2D Kinematics: Tips & Tricks
2D Kinematics: Tips & Tricks
Problem Solving Guide
Algorithm
1. Read and re-read the whole problem carefully.
2. Visualize the scenario. Mentally try to understand what the object is doing.
a. Motion diagrams are a great tool here for visual cues as to what the motion of an object looks like.
3. Draw a physical representation of the scenario; include initial and final velocity vectors, acceleration vectors, position vectors, and displacement vectors.
4. Define a coordinate system; place the origin on the physical representation where you want the zero location of the x and y components of position.
5. Identify and write down the knowns and unknowns.
6. Identify and write down any connecting pieces of information.
7. Determine which kinematic equation(s) will provide you with the proper ratio of equations to number of unknowns; you need at least the same number of unique equations as unknowns to be able to solve for an unknown.
8. Carry out the algebraic process of solving the equation(s).
a. If simple, desired unknown can be directly solved for.
b. May have to solve for intermediate unknown to solve for desired known.
c. May have to solve multiple equations and multiple unknowns.
d. May have to refer to the geometry to create another equation.
e. If multiple objects or constant acceleration stages or dimensions, there is a set of kinematic equations - something will connect them.
9. Evaluate your answer makes sense, are the units and dimensions correct and the results are within reason.
Misconceptions & Mistakes
- An object's acceleration does not determine the direction of motion of the object.
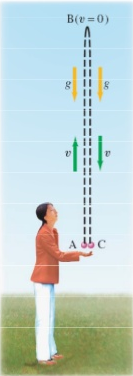
- When an object is thrown upwards at an angle near the surface of the earth, the y-component of velocity is zero at the maximum height that the object reaches, the acceleration is not zero.
- Remember that the velocity in one direction does not imply velocity in another.
- The displacement of an object does not depend on the location of your coordinate system.
- The final velocity of an object when dropped from some height above ground is not zero. The kinematic equations do not know that the ground is there, thus the final velocity is the velocity of the object just before it actually hits the ground.
Pro Tips
- Draw a physical representation of the scenario in the problem. Include initial and final velocity vectors, displacement vector, and acceleration vector.
- Place a coordinate system on the physical representation. Location of the origin does not matter, but some locations make the math easier than others (i.e. setting the origin at the initial or final location sets the initial or final position to zero).
- Always identify and write down the knowns and unknowns.
- Be very strict with labeling the kinematic variables; include subscripts indicating which object they are associated with, the coordinate, information about what stage if a multi-stage problem, and initial/final identifications. Doing this early on will help avoid the common mistake of misinterpreting the meanings of the variables when in the stage of algebraically solving the kinematic equations.
- Remember in 2D kinematics problems is that the two dimensions are entirely independent of each other. Treat them separately, come up with the knowns and unknowns for all variables in each direction.
- Keep track of your angles and break all forces in various directions into their components in your chosen coordinate system.
Multiple Representations
Multiple Representations is the concept that a physical phenomena can be expressed in different ways.
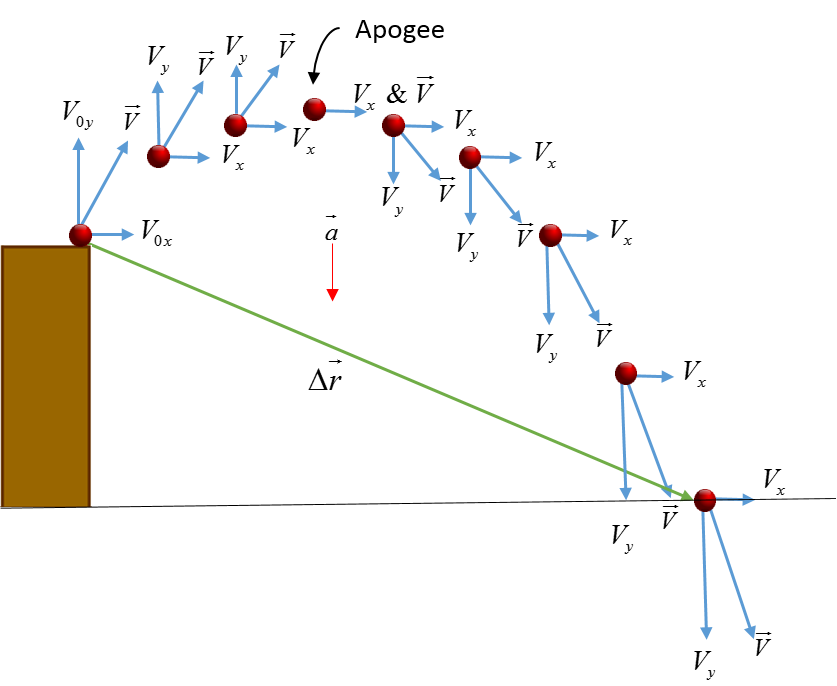
Physical
Kinematics problems are often analyzed with physical descriptions. Below we have an object launched from a ledge with initial horizontal and vertical velocity components. The vectors indicate the relative magnitudes of the horizontal and vertical velocity components at different stages of the objects motion.
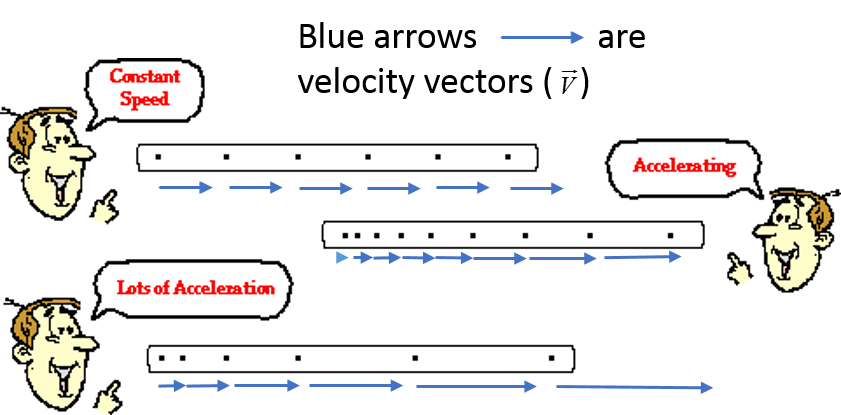
In addition, simple 1D motion diagrams are utilized to describe the speed of an object and whether or not the object has any acceleration.
Mathematical
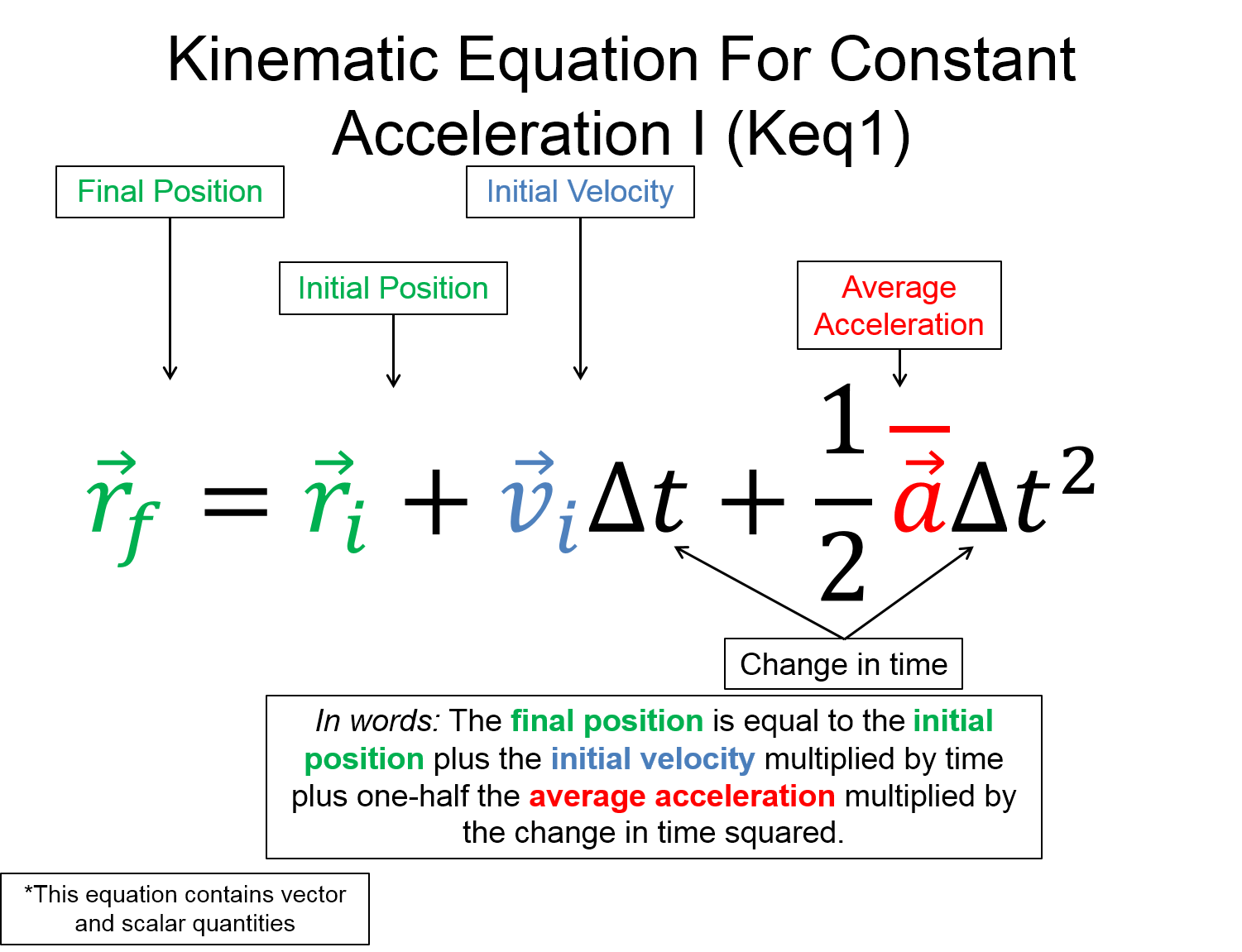
Main kinematics equations. Notice that we use $ r $ to represent the vector position. In the videos below, Professor Matt Anderson uses $ x $ and $ y $ to denote position in a given coordinate direction.
$ \vec{r}_{f} = \vec{r}_{i}+\vec{v}_{i} \Delta t + \frac{1}{2} \vec{a} \Delta t^{2} $
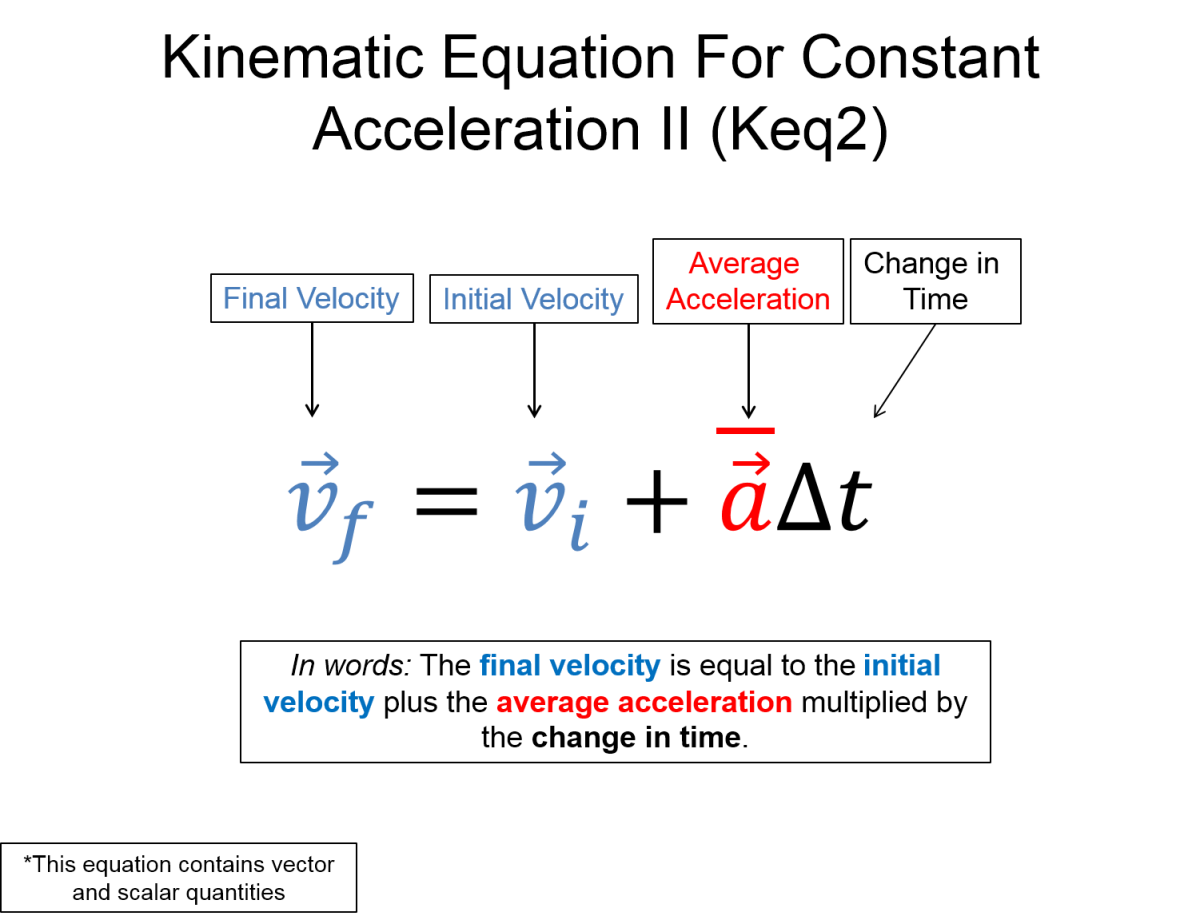
$ \vec{v}_{f} = \vec{v}_{i} + \vec{a} \Delta t $
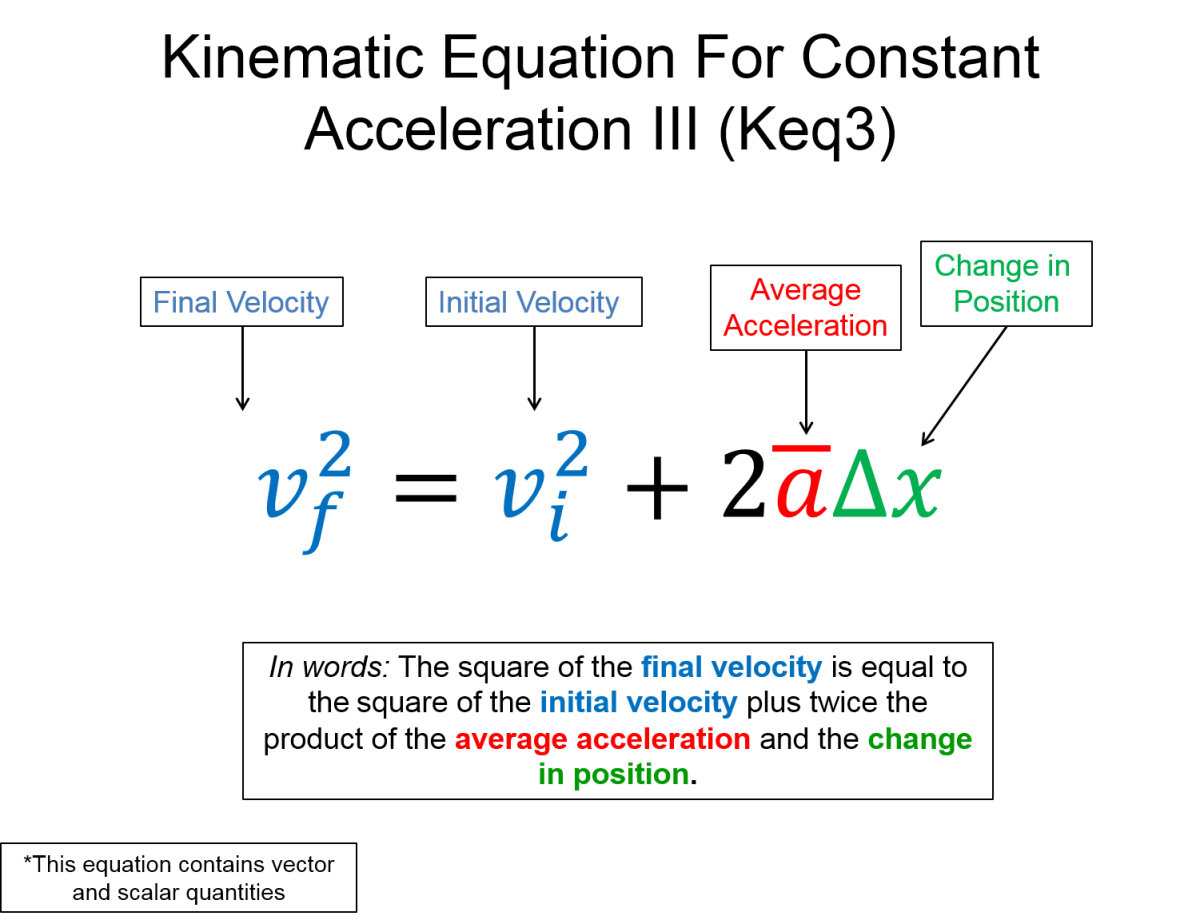
$ v_{fx}^{2} = v_{ix}^{2}+2a_{x} \Delta x $
Watch Professor Matt Anderson explain 1D and 2D Kinematics equations using the mathematical representation.
Video 1: Kinematics equations in 1D
Video 2: Kinematics equations in 2D
Graphical
the Physics Classroom introduces the relationship between kinematics equations and their graphical representation. In addition, for a more in-depth discussion please refer to the graphical analysis section.
![]()
Descriptive
The branch of mechanics concerned with the motion of objects without reference to the forces that cause the motion.
Experimental
For example, a person throws a ball upward into the air with an initial velocity of $15.0 \frac{m}{s}$. You can calculate how high it goes and how long the ball is in the air before it comes back to your hand. Ignore air resistance.