Statics & Dynamics: Tips & Tricks
Statics & Dynamics: Tips & Tricks
Problem Solving Guide
Algorithm
- Read and re-read the whole problem carefully.
- Visualize the scenario. Mentally try to understand what the rigid body is doing and what forces are acting on it along with the location of the forces on the body.
- Draw a physical representation of the scenario, this may include a FBD and/or an e-FBD.
- Draw all forces acting on the object at the known locations. (Helpful hint: Draw a FBD first. All the forces on the FBD will show up on the e-FBD, no more, no less.)
- Define a coordinate system on your e-FBD. Conventional coordinate system is ccw(+) and cw(-).
- Label a location that represents the axis that you would sum torques around. The location of this axis can be placed anywhere, but defining it to be at the location of unknown forces is a good way to eliminate the torque due to the unknown force.
- Specify the moment arms for all forces acting on the e-FBD.
- Identify all the known and unknown terms.
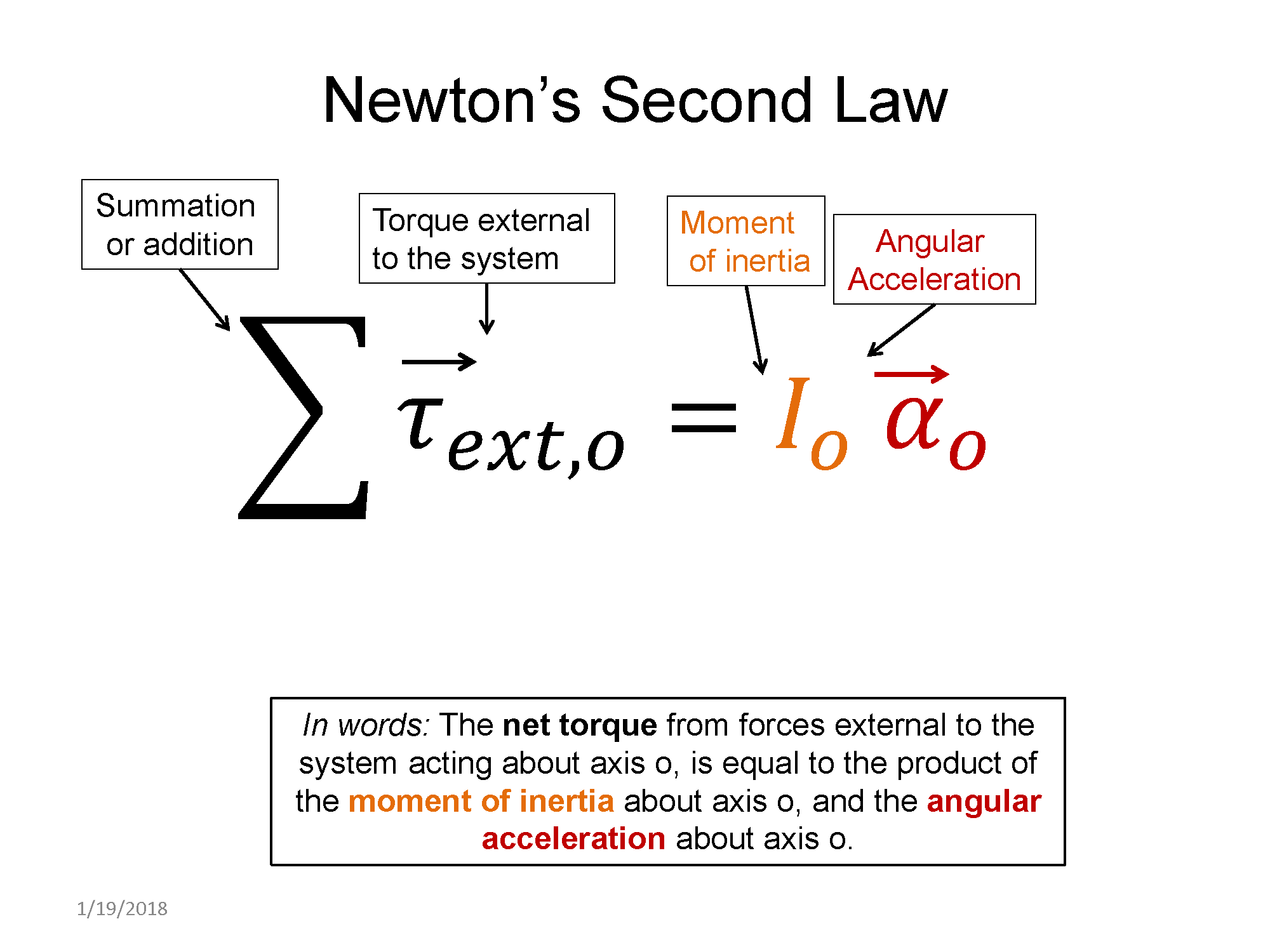
- Use Newton's rotational version of the second law and sum the torques around the axis you chose.
- Identify if the object is in rotational equilibrium or not to determine the value of the angular acceleration.
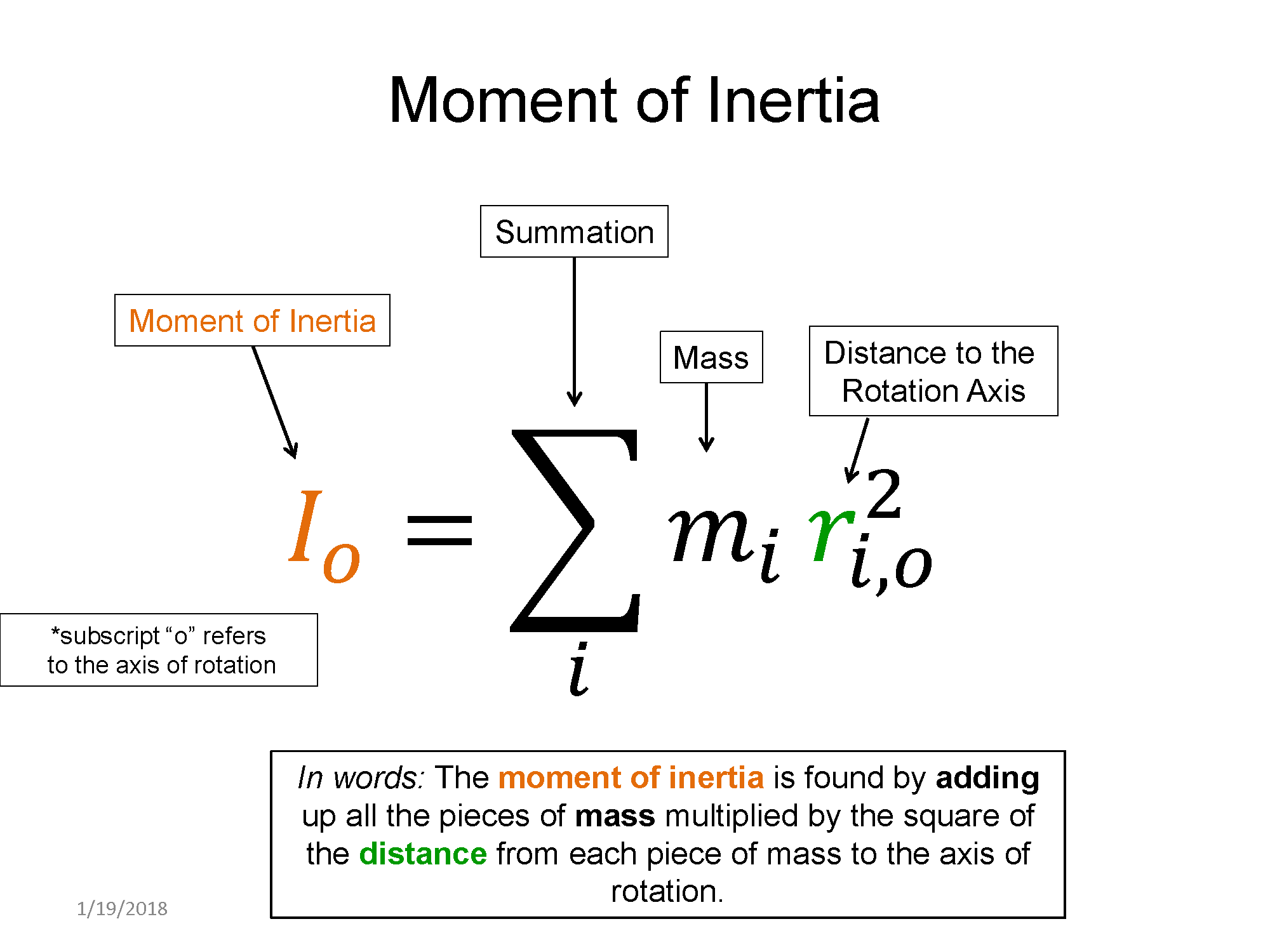
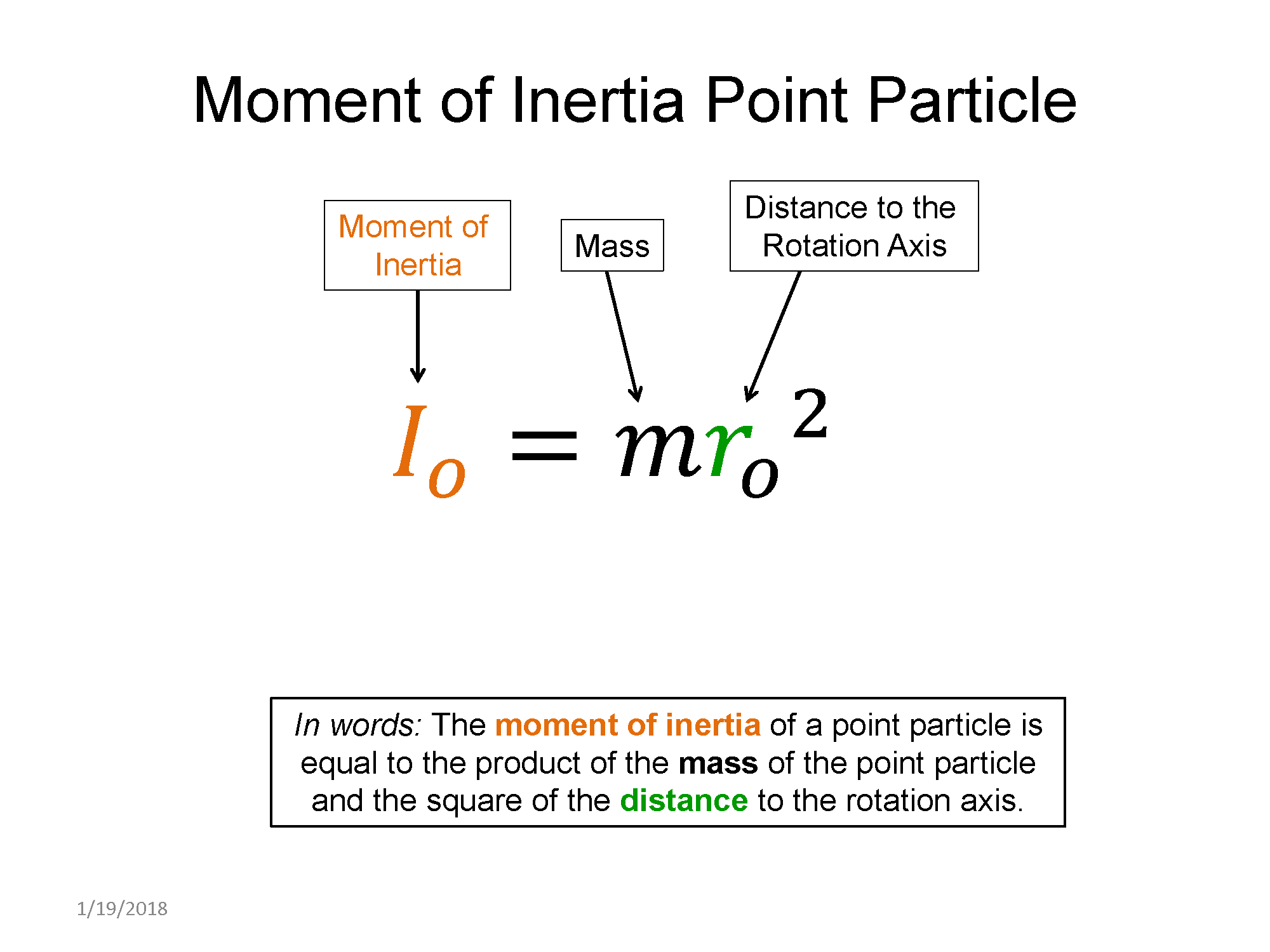
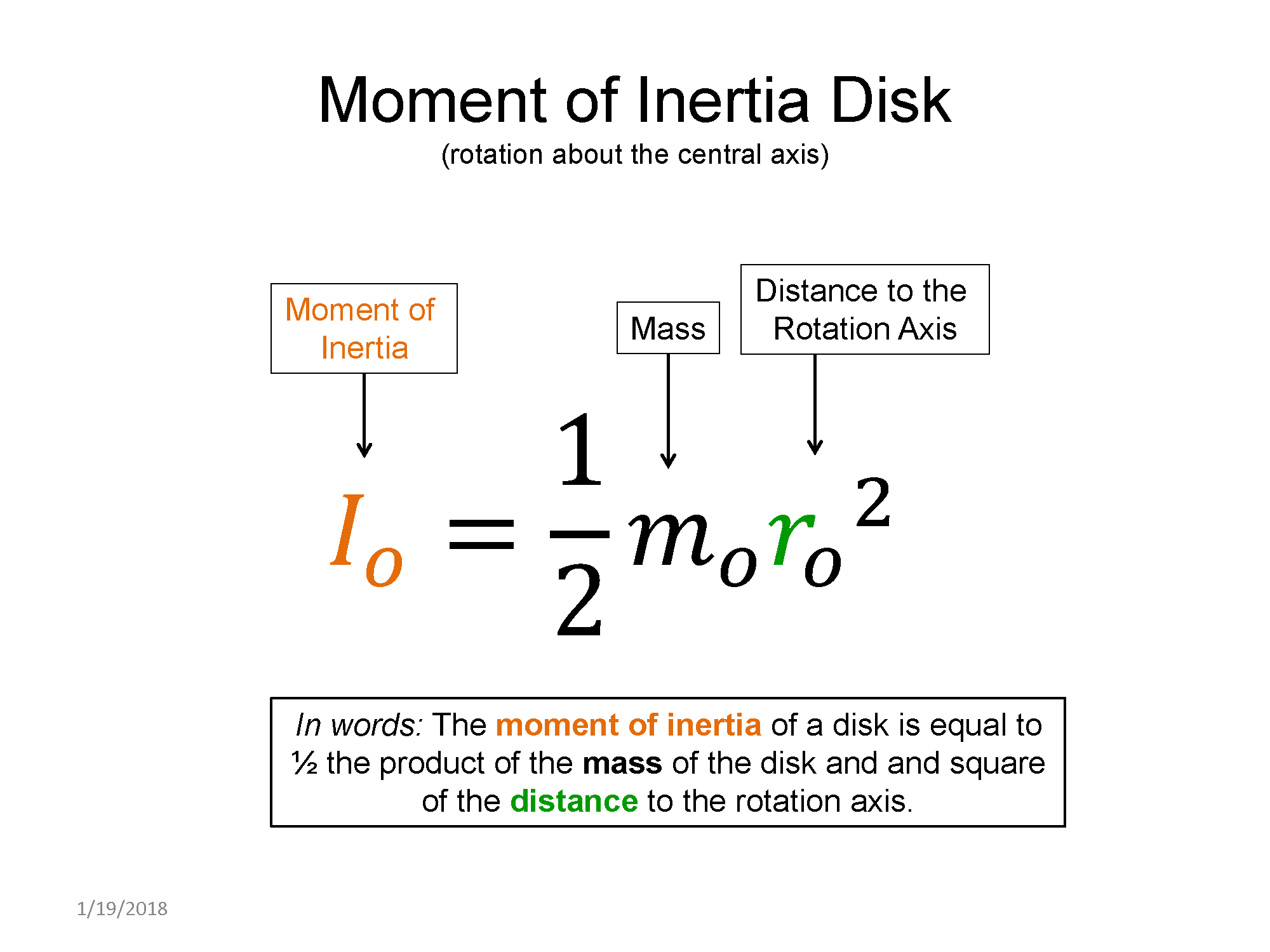
- If the angular acceleration is not zero, determine the moment of inertia of the object around the axis you chose.
- Determine the number of unknowns from your rotational version of Newton's second law equation. If more than 1, perhaps choose a different axis to sum the torques around, or draw a regular FBD to build more equations.
- Carry out the algebraic process of solving the equation(s).
- Evaluate your answer, make sure the units are correct and the results are within reason.
Misconceptions & Mistakes
- The axis you choose to sum the torques around does not have to be the actual pivot point that the object would rotate around.
- When calculating torque, do not forget to add a positive or negative based off of the direction that the force wants to rotate the rigid body about the axis you chose.
- An object does not have a single moment of inertia. The moment of inertia depends on the axis that the object would rotate around. Thus objects can have many moments of inertia for different axes.
- Torque has the same dimensions of energy, but torque is not a form of energy. Torque is a vector, and energy is a scalar
Pro Tips
- For any force that is not parallel or perpendicular to the moment arm, take the time to draw a vector operation to determine the correct angle between the force and moment arm.
- If you are having troubles identifying forces for an e-FBD, draw a regular FBD first. The same forces that show up on a regular FBD for an object show up on an e-FBD for the same object. In addition, often-times using both a translation analysis and a rotational analysis together will help expedite the process of solving the problem.
- Identify all the known and unknown forces on your e-FBD before you define an axis to sum the torques around. Once you know which forces are unknowns, try defining your axis through the location of the unknown forces to eliminate the unknown force in the final equation derived from summing the torques.
- If there is a torque which an unknown direction, just guess the direction and apply the rotational analysis of summing the torques. For example, if you guess a torque to be ccw(+), and you get a negative number for the value of that torque, then you define the direction incorrectly initially, if the value was positive, then you guess correctly (assuming no algebraic mistakes).
- Scaling forces and distance on an e-FBD can help you visualize the contribution of each torque from each force. When finished solving the problem, you can then go back to your scaled drawling to see if the answer is what you were expecting.
Multiple Representations
Multiple Representations is the concept that a physical phenomena can be expressed in different ways.
Physical
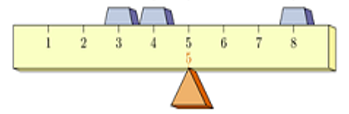
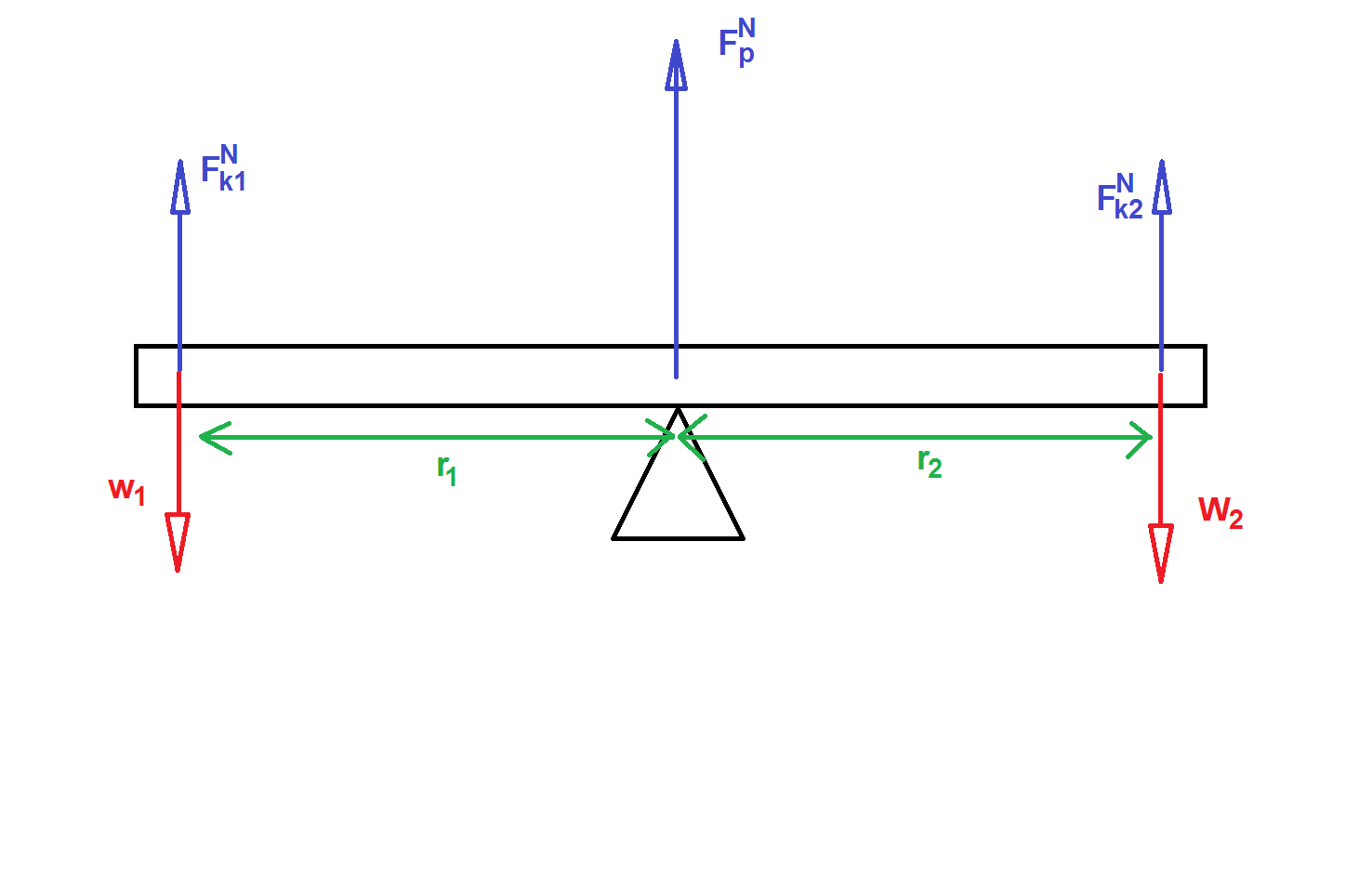
We represent the system with an extended free body diagram which places the forces at locations, lets consider two kids on a seesaw.

Naturally your not expected to draw something as complex as the above, you should draw something like the following.
Mathematical
Forces acting on an object can cause torque about some given axis. Torque ($\tau$) is defined as a cross product between force and displacement.
$\tau = r \times F$, r is the displacement vector from the axis of interest to the location the force is applied.
Remember to take geometry into account when calculating torque! Only the force component perpendicular to $r$ contributes to the torque.
$|\tau| = |r| |F| \sin \theta$
With regards to our seesaw scenario, the net torque of the see saw about its pivot axis is,
$\sum \tau = r_1 \times F^{N}_1+r_2 \times F^{N}_2$
If $\tau_{net} = 0$, then we say that the system is in rotational equilibrium.
The net torque and moment of inertia about a chosen axis tells us something about the angular acceleration of that body about that same axis.
$\alpha = \frac{\sum \tau}{I}$

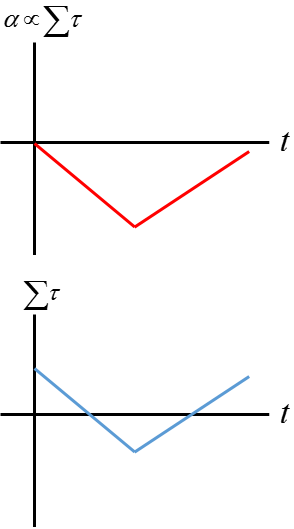
Graphical
Rotational acceleration is proportional to the net sum of all the torque.
Descriptive
Two children sit on a seesaw. Child 1 sits a distance of $r_1$ from the pivot. On the other side, child 2 sits a distance of $r_2$ from the pivot.
Experimental
Find a straight long flat piece of wood like the one in the figure below. Next, grab some objects to place on the piece of wood. Now, place the piece of wood on top of a fulcrum and add arrange some objects on it so that the piece of wood balances on the fulcrum. You can vary the position of the wood and try placing the objects in a new arrangement to see where they need to go in order to find the equilibrium.