Rotation and Conserved Quantities | Angular Momentum and Rotational Kinetic Energy
Angular Momentum
Just as linear momentum represents a quantity that scales a mass by its velocity, angular momentum represents a quantity that scales the extended mass of an object by its angular velocity. It is mathematically defined as
$ L = I \omega$
where $I$ is the moment of inertia of an object, and $\omega$ is its angular velocity. Angular velocity is a vector quantity but we will not be discussing that aspect and instead will use a sign convention that it can take positive or negative values: (+) for counter-clockwise motion or (-) for clockwise motion. Angular momentum is helpful for understanding the motion of real-life objects, such as rotations of galaxies about their galactic center or the motion of a merry-go-round as a child walks from the outside in.
If we compare the linear and angular momentum equations directly we see they are very similar:
$p = m v $
$L = I\omega$
Where the moment of inertia, which represents how the mass is distributed about some point, takes the place of mass; and omega, which represents how that extended mass is moving about a point, takes the place of velocity.
As a quick example, imagine a wheel with a mass of 1kg and a 50 cm-diameter spinning about an axle at a rate of 2 rad/sec. If we assume the spokes are massless we can use the moment of inertia for a spinning ring, $I_{ring} = mr^2$, to describe the wheel, where $r$ is the radius of the wheel and $m$ is the mass of the wheel:
above is the sort of calculation you will do a lot of in this section.
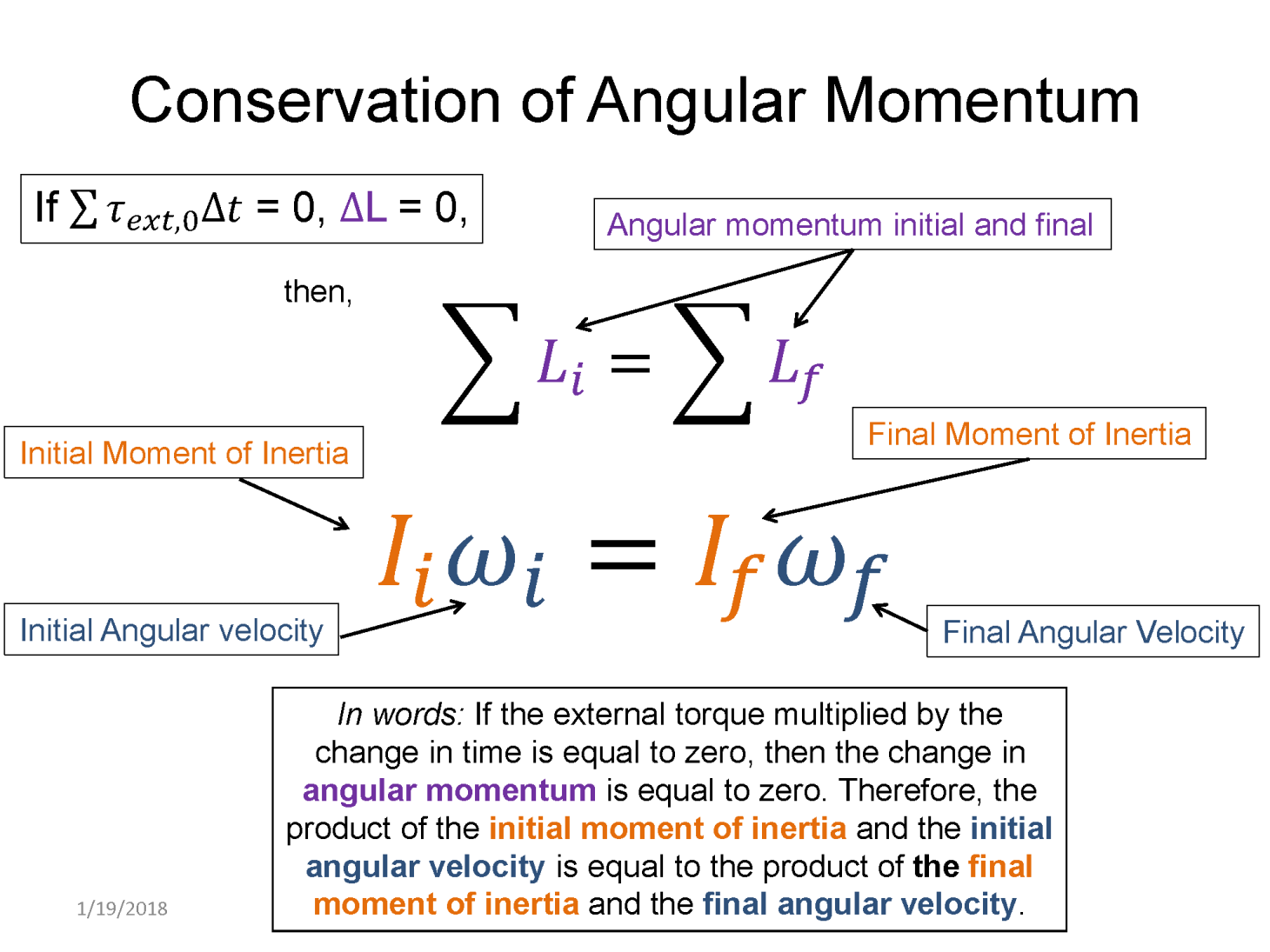
Just like linear momentum, angular momentum is a conserved quantity with its own conservation law:
$\Sigma \tau_{ext} \Delta t = \Delta L$
This equation says that if the net external torque is zero, angular momentum will not change. This equation is just like the impulse-momentum theorem from linear momentum and, when we plot $\Sigma \tau_{ext}$ (also known as $\tau_{net}$) versus $\Delta t$, we can find the area under the curve to determine how much angular momentum has changed in some time interval. This is exactly the same as how we used plots of $F_{external}$ versus $\Delta t$ to determine how much linear momentum would change in some time interval!
For example, imagine you're riding an electric scooter. The electric motor in the scooter applies a torque to the wheels to get them to spin. We can determine how much angular momentum is being added to the wheel by examining the torque versus time plot: